
Otro de los proyectos en los que he aplicado...
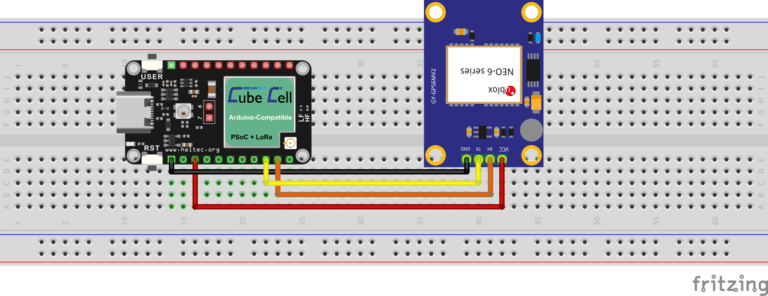
gps
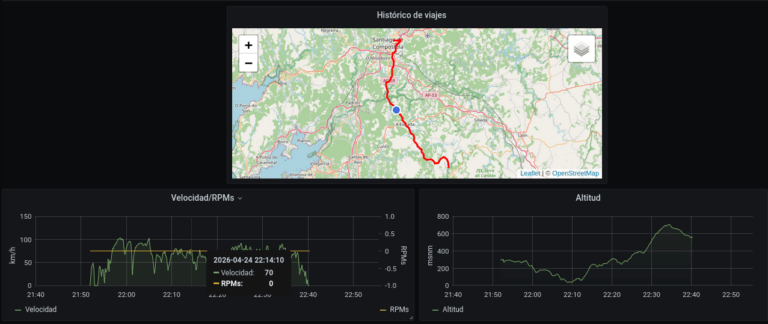
Uno de los pequeños placeres de un sistema de...
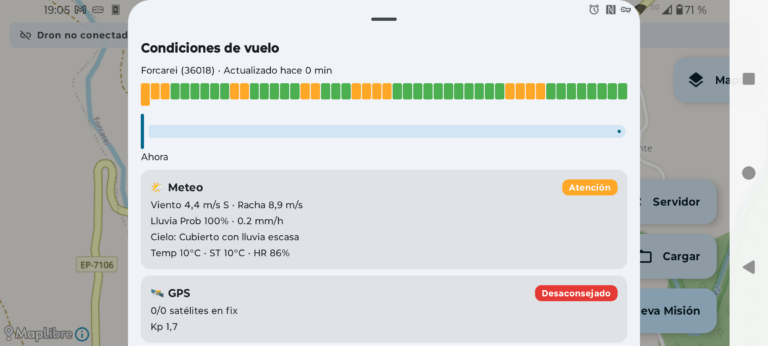
Hay una pregunta que cualquier piloto de drones se...
En el artículo anterior de esta serie describí el...
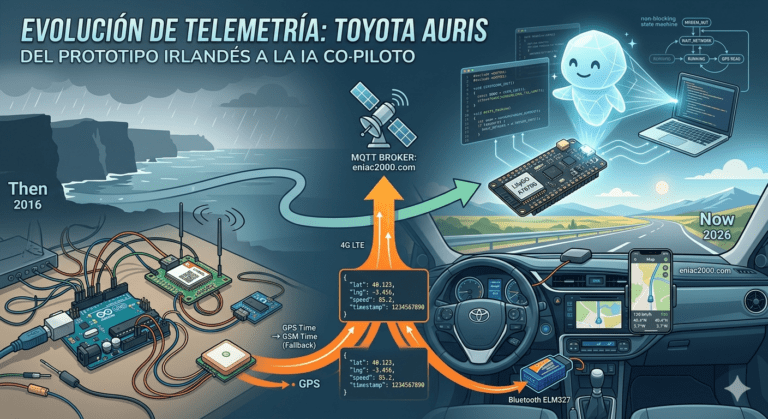
Allá por finales de 2016, cuando aún vivíamos por...
Llegados a este punto, el siguiente paso en el...
Una vez solventados los asuntos de la infraestructura LoRaWAN,...

Hace ya algunos años que llevo trasteando con la...
Quien haya leído este diario en las últimas semanas...

Hace ya algunos años, cuando aún vivíamos en Irlanda,...




