
España ha vuelto a proclamarse Campeona del Mundo de...

La Fase 9 dejó el sistema completo sobre el...
Hace ya un par de añitos empecé una serie...

Otro de los proyectos en los que he aplicado...

Llevo unos meses dándole vueltas a una idea que...

La Fase 8 dejó cerrado el panel de condiciones...
Hay un momento en todo vuelo de dron sobre...
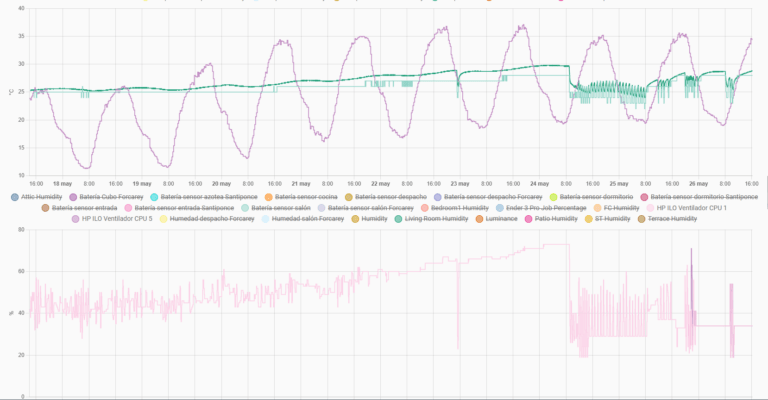
Uno de los pequeños placeres de un sistema de...

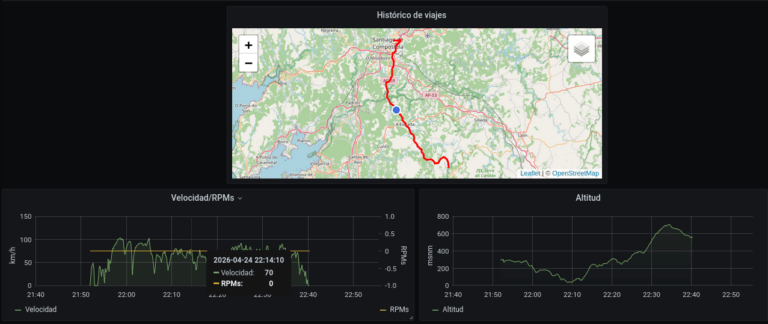
Ana es funcionaria docente en Galicia. Cada año, en...





