
El pasado miércoles 30 de diciembre hice la última...
Mes: diciembre 2015

Hace ya bastante tiempo escribí algo acerca de un...
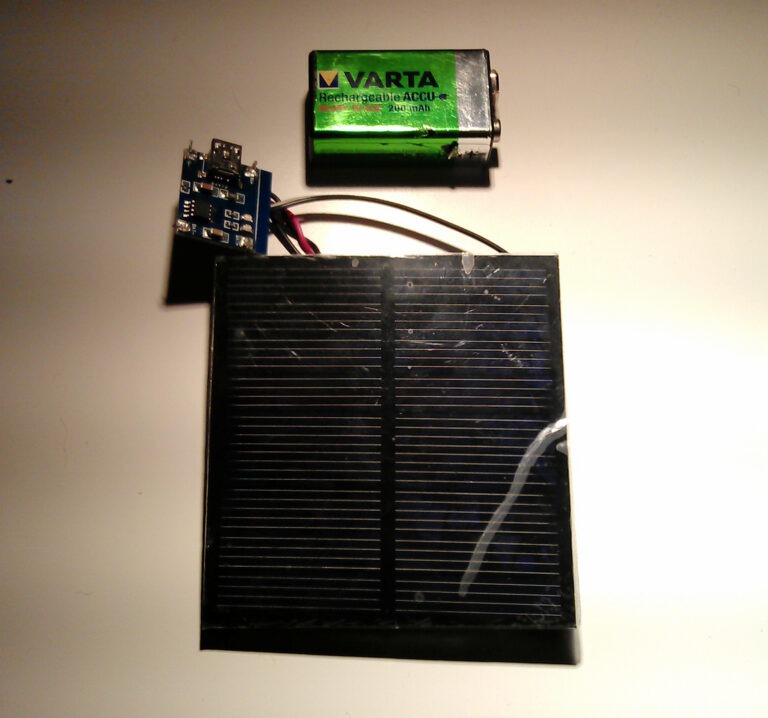
Estas últimas jornadas he estado trabajando en un sistema...





