
Otro de los proyectos en los que he aplicado...
python
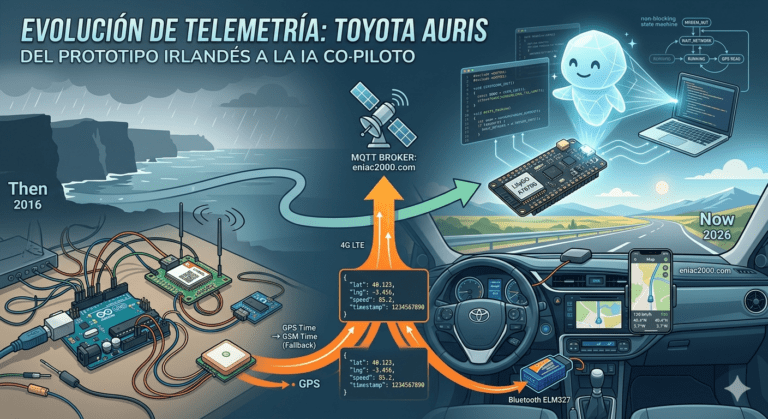
Allá por finales de 2016, cuando aún vivíamos por...

Otro de los proyectos en los que he estado...

En fechas recientes he realizado un aprovechamiento interesante de...
Escribía en mi entrada anterior que estaba trabajando en...

Ahora sí que sí. Escribía hace unos días que...

Seguimos con los trasteos. Como complemento al sistema de...




