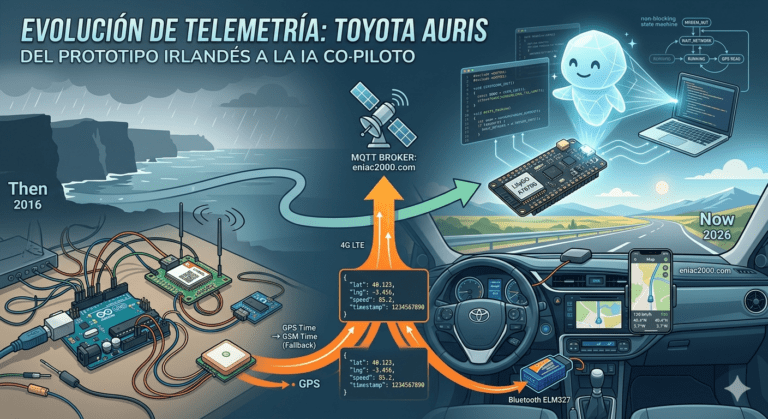
Allá por finales de 2016, cuando aún vivíamos por...
arduino
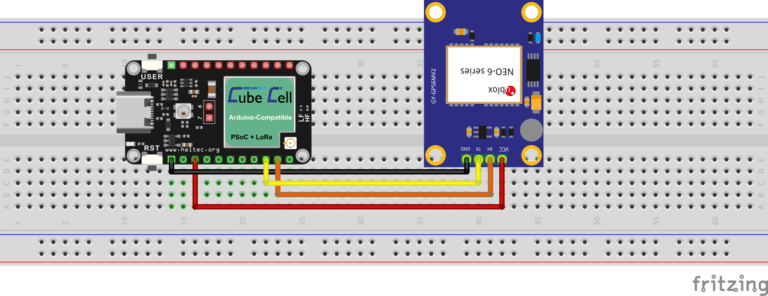
Una vez solventados los asuntos de la infraestructura LoRaWAN,...

Hace ya algunos años, cuando aún vivíamos en Irlanda,...

No voy a descubrir nada nuevo si afirmo que...




