Allá por finales de 2016, cuando aún vivíamos por...
obd-ii

Hace ya algunos años, cuando aún vivíamos en Irlanda,...
Escribía en mi entrada anterior que estaba trabajando en...
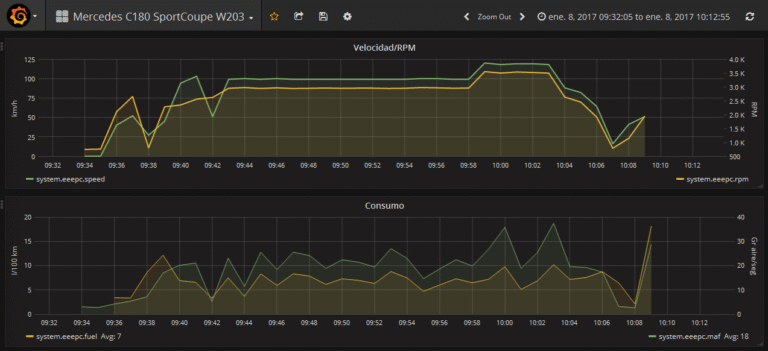
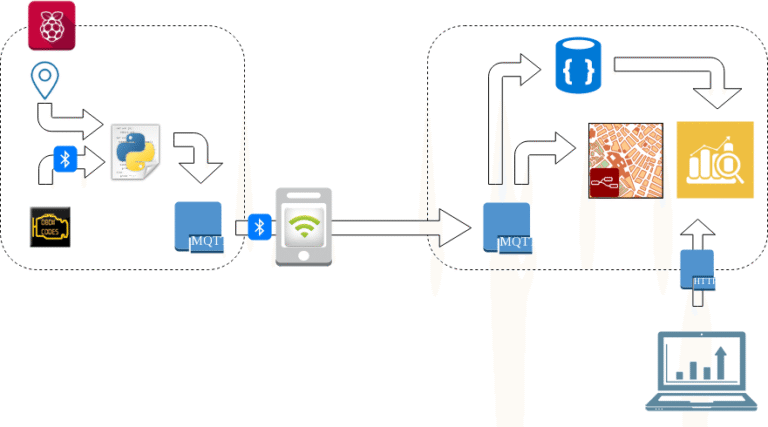
Pues eso. Me he montado un pequeño sistema de...




