
La mañana del 24 de septiembre amaneció como había...

El 23 de septiembre de 2024 realizamos la segunda...

El 22 de septiembre de 2024 empezamos la primera...

A finales de septiembre de 2024 mi padre y...

Hay días en los que la montaña no te...

El pasado 18 de enero de 2026 nos regaló...
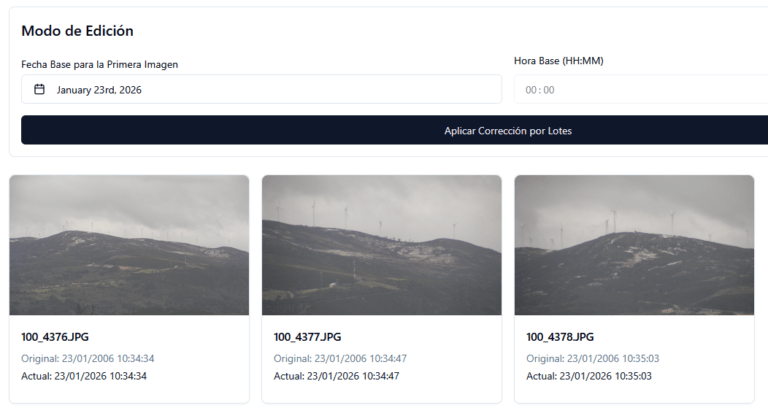
Escribía hace algunos meses sobre una aplicación que había...

El pasado 10 de enero de 2026 di un...

El pasado 7 de enero de 2026 volví a...
Aquel 23 de septiembre de 2025 comenzó como una...




