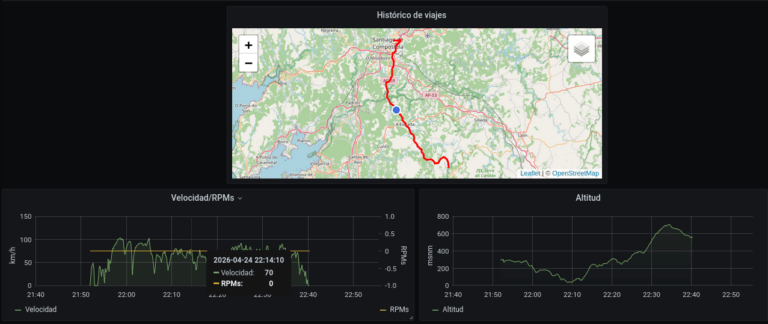
Uno de los pequeños placeres de un sistema de...
mqtt
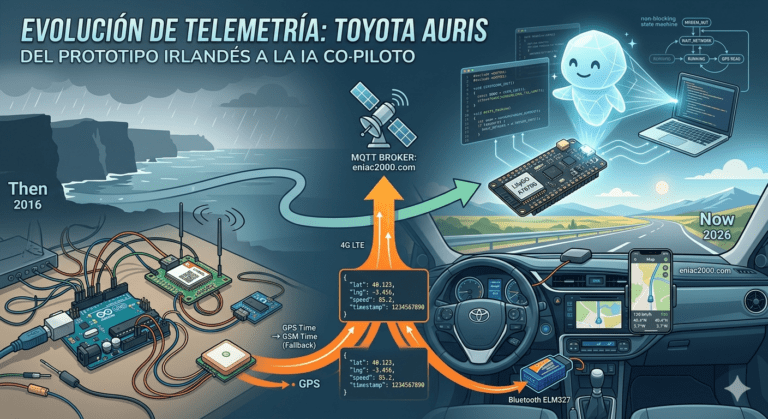
Allá por finales de 2016, cuando aún vivíamos por...
Comentaba en el artículo anterior que la primera evolución...

Otro de los proyectos en los que he estado...

El proyecto, llegado a este punto, había cumplido con...
Llegados a este punto, el siguiente paso en el...
El primer punto para iniciar el proyecto de trazabilidad...

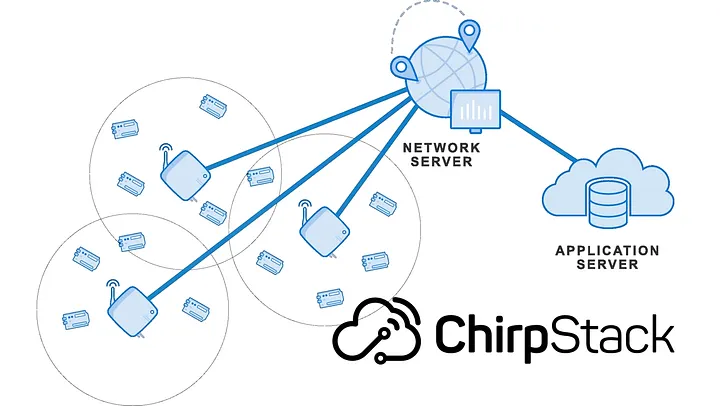
Hace ya algunos años que llevo trasteando con la...

En las últimas semanas he estado realizando una serie...

Como decía en el anterior artículo, estoy haciendo algunas...




