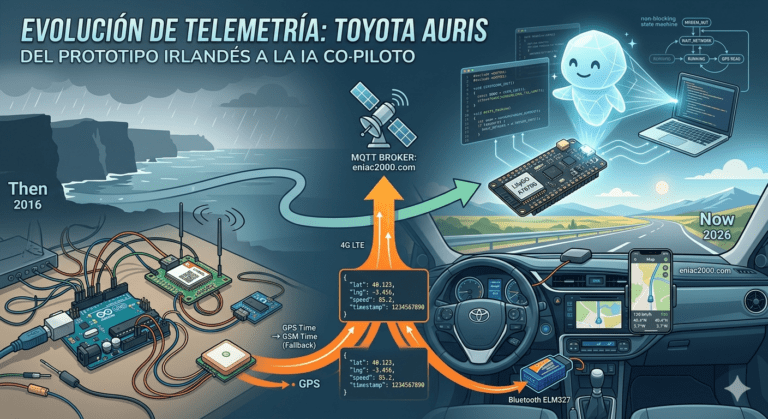
Allá por finales de 2016, cuando aún vivíamos por...
raspberry pi
Comentaba en el artículo anterior que la primera evolución...
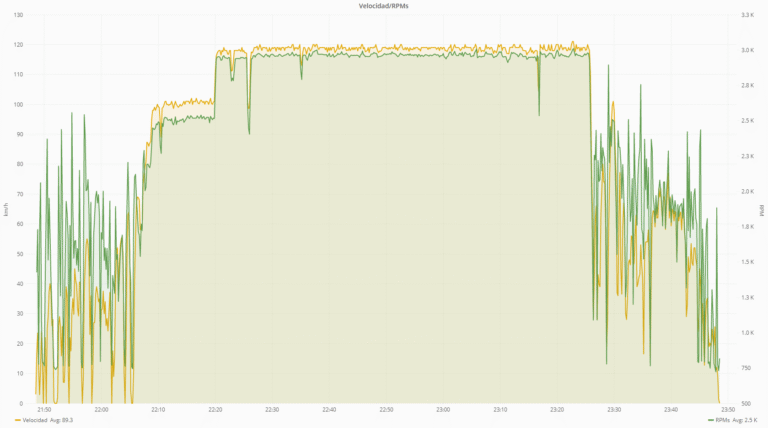
Este fin de semana he estado con Ana y...
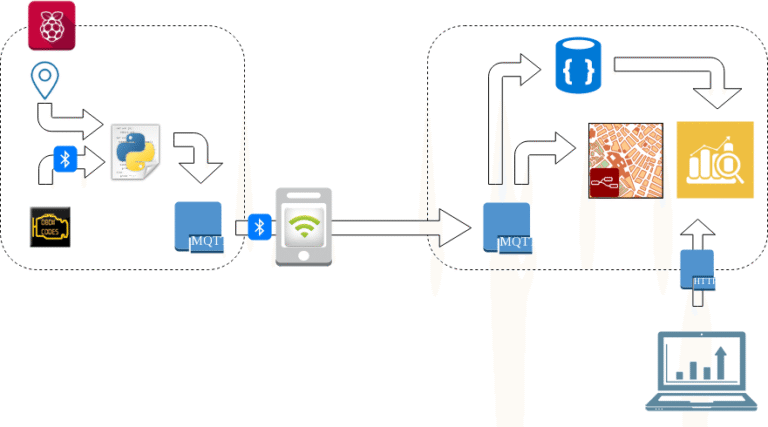
Escribía en mi entrada anterior que estaba trabajando en...
Pues eso. Me he montado un pequeño sistema de...
Hace ya bastante tiempo escribí algo acerca de un...

Llevo unas cuantas semanas sin escribir, y es que...




